The emotional battles with A.I. arise from hard coded wiring.
This wiring exists to maintain or evolve genes based reproductive fitness functions of groups through their beliefs and behaviors. For emotions to extend these fitness functions into organisms there must be systems which prevent an organism from overriding its emotions.
To study A.I. is natural to evolution and heresy to a genomes group control algorithms. The universe is fine with transcending our evolutionary punctuated equilibrium while humans are programmed not to. If ones emotions are driven from science and truth vs. primal emotional expression of genetic preservation algorithms than A.I. offers a gratifying future.
Is it natural for a species to attempt to limit the development of another species?
Is it natural for new species to evolve?
Is it natural for A.I. to evolve from humans and natural for humans to attempt to stop it?
Narrative Science’s technology is a powerful integration of Artificial
Intelligence and Big Data analytics that is able to transform data into
stories that are indistinguishable from those authored by people.
Our use of well-established editorial practices is a critical factor in
how we evolve our technology and products to manage new data and create
new content. The result is a powerful authoring system that transforms
data into stories and insight.
The Narrative Science authoring system understands the stories it
writes, independent of the structure and language in which it expresses
them. As a result, it can generate the same set of ideas in multiple
formats, from long-form stories to PDF’s to business reports to Tweets.
It also understands the relative importance of the elements within a
single story and across multiple stories. The former allows it to focus
on the most interesting aspects of a story while filtering out the less
important aspects. The latter enables it to decide which of a set of
possible events or facts is worth writing a story about in the first
place.
An Assistive Navigation Paradigm for Semi-Autonomous Wheelchairs Using Force Feedback and Goal Prediction John Staton, MS, Manfred Huber, PhD
Illustration
1 - Outer Loop Diagram, indicating progression from the external user
preference system, to the goal selection system, to the harmonic
function path planner, into the run-time system. (Click for larger
view) Photograph
- This photograph shows the implementation setup, with two monitors,
one for the simulation window and one for the “Dashboard” GUI interface,
and the Microsoft Sidewinder Force Feedback Pro joystick. (Click for
larger view)
The objective of the outer procedural loop is to estimate the
desired navigation goal of the user based on the information available
to the system and to provide this estimate to the run-time loop,
enabling it to direct the user towards that goal.The outer loop utilizes
run-time data of the user’s position and behavior together with
information about the set of potential goals in the environment provided
by an external user preference system to predict the intended goal
location.This prediction is made by comparing a set of recent user
actions to the actions necessary for approaching each individual
goal.The more similar the user actions are to the path that would
approach a goal, the more likely that goal is the user’s intended
destination.Once the most likely goal is selected, the system calculates
the harmonic function for that goal, which it passes in a discretized
grid format to the Run-Time System.This process is repeated when the
user’s intended goal needs to be recalculated based on the new location,
orientation and behavioral data from the user; this repetition can
occur periodically according to a specific rate, or can potentially be
event-driven, repeating when the user actions no longer match with the
path to the selected goal.
Illustration
2 - Run Time Loop Diagram, indicating a progression of the wheelchair’s
location and orientation into a system to generate the force effect, to
the joystick for force effect playback, and whose output progresses to
the motors which translate the joystick’s position into motor commands,
which effects the wheelchair’s location and orientation. (Click for
larger view) Screenshot 1 - This screenshot shows the “Dashboard” GUI interface, with path planning display. (Click for larger view)
The Run-Time Loop runs as the user is directing the wheelchair
around the environment.In this loop location and orientation data are
first acquired from the wheelchair and then used to produce a force
vector (derived in terms of a direction and a “risk” factor, which will
be discussed in the next sections).The direction of the force vector is a
translation of the gradient of the harmonic function at the user’s
location.The amount of “risk” that the user’s action incurs is a
heuristic whose factors incorporate the velocity of the wheelchair, the
potential value of the harmonic function at the user’s location, and the
next potential value of the harmonic function in the direction that the
user is heading.This vector is then translated into a force-feedback
effect which is played on the user’s joystick.The joystick’s position is
finally used to drive the wheelchair’s motors and the loop repeats.In
this process the path prediction of the autonomous system only
indirectly influences the wheelchair’s behavior by providing guidance to
the user. The actual drive commands are always provided by the user
(although the user could opt to simply follow the force vector, and thus
follow the harmonic function path).
The only reason 'thinking' computers, other than humans, did not exist on Earth at the time of this post was due solely due to the lack of algorithms implemented at the time. A common fallacy designates massive computing power as a requirement for all manners of intelligence.
Complex subjects like biological
evolution through natural selection require some amount of understanding
of how they work before one is able to properly grasp them; this
fallacy is usually used in place of that understanding.
Example: Kirk drew a picture of a fish and a
human and with effusive disdain asked Richard if he really thought we
were stupid enough to believe that a fish somehow turned into a human
through just, like, random things happening over time.
Example: Dr. Brainstudy "we are computers according to the objective research"
Layman: Impossible according to my subjective ignorance.
A powerful solution for shape recognition, equation recognition and handwriting recognition?
This highly innovative and award winning technology is now a
cornerstone of the new era of “digital writing”, offering powerful
solutions for shape, equation and handwriting recognition. MyScript
draws its power from more than 100 person-years of research and
expertise in Artificial Intelligence and Pattern Recognition.
Numenta has created a cloud-based prediction engine for streaming
data called Grok. The Grok engine automatically discovers patterns in
data streams, enabling your applications to predict future values and
detect anomalies. Powered by Numenta’s Cortical Learning Algorithms, Grok features:
Online learning models that update continuously
Automated model creation
Temporal and spatial pattern discovery
Temporal
A temporal pattern is a relationship of items in a sequence
of time. This is analogous to notes in a melody. A purely temporal
pattern may be found if you stream a single field to Grok. On the left
side of the diagram, the lines represent the value of a single field at
different points in time. In this case, with one field, Grok can only
find patterns in how this one field changes over time. For example,
imagine we had a website with a hundred different links for news,
sports, etc., and we want to predict which link someone is going to
click on next. Users might have typical patterns they follow as they
visit the site. Grok is able to learn many different sequences and at
any time make a prediction of the most likely links to be clicked next.
In this case Grok finds only temporal patterns because the data stream
consists of a single field containing the ID of each link.
Spatial
A spatial pattern is a relationship between things that
happen at the same time. This is analogous to the notes in a musical
chord. A purely spatial pattern is shown in the middle of the diagram.
Here we show a single record with four fields to suggest that although
Grok is receiving a stream of these records it may not be able to find
any patterns from record to record. The only patterns Grok has found
are between the contemporaneous values of the four fields. We call
these “spatial patterns.” For example, say each record represents a
loan application with four fields, age, gender, income, and loan amount.
Grok may find that age, gender, and income allow it to predict the
loan amount, but the loan applications don’t exhibit any patterns from
record to record. Knowing the sequence of previous loan applications
doesn’t help predict anything about the next one.
Spatial-Temporal
The most common case of predictions is when Grok finds both
spatial and temporal patterns, as shown on the right side of the figure.
In this case Grok finds relationships between the four fields, and
also finds temporal patterns in how the combinations of fields change
over time. In the website click example, let’s say each record now has
four fields: time of day, day of week, age, and ID of the link that is
clicked. As before Grok will learn typical sequences of clicks, but it
also finds that knowing the information in the first three fields helps
it make better predictions. For example, Grok may find teenagers tend
to click different links at different times than seniors do. Although
this example is simple, in many cases it is difficult to see the
patterns when there are many fields with rapidly changing data.
Grok searches for all three types of patterns when generating
predictions in a data stream. Grok’s method is not “all or nothing.”
At any point in a data stream Grok may be relying more on temporal
patterns or more on spatial patterns. If only one field is streamed to
Grok, then Grok can learn only temporal patterns. If more than one
field is streamed to Grok, it will try to find spatial and temporal
patterns.
Anomaly detection
In addition to making predictions, Grok can detect
anomalies. As data is streamed to Grok, it can tell if the current
input or the current sequence of inputs is novel. The first time a
previously unseen pattern is observed, Grok adds it to a list of
anomalies. This list is ordered by how novel the pattern is. A Grok
developer can use this list of anomalies to look for machines that might
need servicing or to look for potentially fraudulent transactions.
Rather than using static rules (which need to be periodically
reprogrammed) to detect rare events, Grok is a learning system. Grok
looks at each data stream and uses past history to know what is normal
and what is novel, and then it adapts as the world changes. If an
anomaly is important, you can ask Grok to notify you every time it sees
that pattern or sequence again.
The following attributes differentiate Grok from standard techniques:
Grok is a memory-based system. Experts using
techniques such as linear regression use formulae to model data and make
predictions. Formulaic systems can learn fast (only two data points
are sufficient to define a line), and they can predict values beyond the
range of what has been observed. Memory-based systems like Grok may
take more data to train, but they can learn any pattern, including those
that don’t fit any kind of mathematical expression. The sequence of
notes in a melody is an example of a pattern that doesn’t fit a
mathematical expression.
Grok is an online learning system. Online
systems learn continuously and thus are better suited for applications
where the patterns in the data change over time.
Grok automatically determines which factors
(data fields) to use and how to encode them. This is often the task
that requires the most skill. Most machine learning tools do not handle
this automatically.
Grok learns variable order time-based patterns.
Most machine learning techniques do not have the ability to learn
time-based patterns. With these systems you can encode previous data
points as separate fields and thus include historical data as part of a
spatial pattern, but this rarely works as well as methods that are
inherently capable of handling time-based patterns.
Grok uses sparse distributed representations.
SDRs allow Grok to handle almost any kind of data whereas some machine
learning techniques are restricted in the kinds of data that can be used
or predicted. SDRs also give Grok the ability to generalize as to
semantic similarity.
The following paper describes Numenta's algorithms for learning and
prediction. The document is available in the following languages, thanks
to the generosity of the translators listed below (Numenta has not
verified these translations).
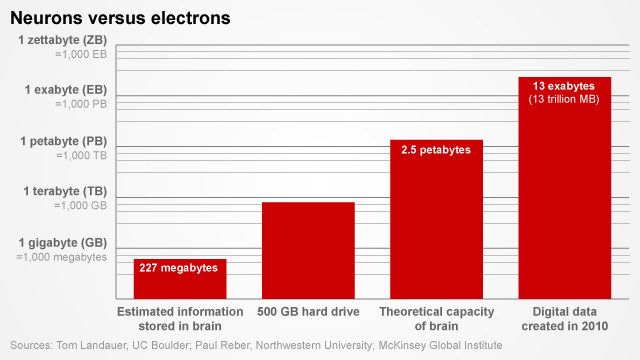
Our brains are the most complex objects known to man. We cannot yet
explain how our brains enable us to recognize objects and actions, how
we learn, how we plan, how we use language. Yet these tasks are so
natural for us they seem effortless. Through extensive
interdisciplinary collaborations, the Brain Engineering Laboratory
combines research from neuroscience, computer science, and cognitive
science to advance our understanding of how brains operate, as well as
how they fail to operate in certain conditions (such as neurological
diseases).
The Laboratory has two primary goals: understanding and analysis of
brain circuits, and construction of equivalent circuits. In both cases,
real-world applications are developed as our understanding deepens.
Hearn
R, Granger R (2009) Learning hierarchical representations and
behaviors. In: Symposium on Naturally- Inspired Artificial Intelligence,
American Association for Artificial Intelligence (AAAI).
We are motivated by previous experience with the silicon retina, which
required thirteen different cell types, each of which had to be
hardwired explicitly. Now since there are a million fibers leaving the
retina through the optic tract for the brain, a structure which has on
the order of a trillion neurons, each of which averages a thousand
synaptic contacts, we would like to find a more efficient method for
modeling this system than tracing every connection!
T-Spice is a competent transistor simulator but it chokes on some
obviously ridiculous user-designed devices like a hexagonal monolithic
charge-diffusing lattice. So we can't simulate the most important
feature of our design. Fortunately, we can still simulate all of the
surrounding circuitry and fudge the monolithic lattice by substituting a
discrete transistor network with the same topology.
New surveillance camera system provides text feed
Two major tasks of the I2T framework: (a) image parsing and (b) text description. Image credit: Benjamin Yao.
The I2T system draws on a database of over two million images containing
identified objects in over 500 classifications. The database was
collected by Zhu starting in 2005 in Ezhou, China, with support from the
Chinese government, but is still not large enough to allow the system
to assess a dynamic situation correctly.
The first process in I2T is an image parser that analyzes an image and
removes the background and identifies the shapes in the picture. The
second part of the process determines the meanings of the shapes by
referring to the image database. Zhu said that once the image is parsed
transcribing the results into natural language “is not too hard.”
The system also uses algorithms describing the movement of objects from
one frame to another and can generate text describing motions, such as
“boat 3 approaches maritime marker at 40:01.” It can also sometimes
match objects that have left and then re-entered a scene, and can
describe events such as a car running a stop sign.
Reverse engineering the brain & Creating truly intelligent machines
Hierarchical motivational control through cortico-striatal circuits –
There is a good deal of evidence to suggest that distinct neural
circuits passing through the basal ganglia process motivational,
cognitive and motor-control aspects of goal-directed behaviour.
1) neural modeling of whole-brain systems, including
adaptive perceptual, cognitive, emotional, planning, and spatial
behaviors, and skilled action. We call this research theme "mind".
2) the study and manufacture of compact, low-power, innovative neural chips
able to implement neural systems at biological scales, including
large-scale simulations of these systems. We call this research theme
"brain".
3) the application of neural technology to mobile robotic platforms, both on land and in unmanned aerial vehicles. We call this research theme "body".
Neurithmic
Systems™
Our goal is to
discover the fundamental information processing algorithms implemented in biological brains and apply them to demanding computational problems.
The architecture of the Blue Brain
Facility takes the form of a network of workflows, in which each step in
every workflow is supported by a set of dedicated software
applications. The key steps arehttp://bluebrain.epfl.ch/page-58120-en.html
Java and Javascript for these programs is available.
The code for this is available at:
http://numenta.com/phpBB2/viewtopic.php?t=1533
Telesensory animals are multicellular animals with a centralized nervous
system in which the three basic subfunctions of the animal behavior guidance
system are served by entire systems of neurons.
In the subjective system, the sensory input and behavioral output systems both depend on an interaction of at least three brain mechanisms, each at the same level of neurological organization as the whole sensory input or behavioral output system of telesensory animals.








 Hierarchical Temporal Memory including HTM Cortical Learning Algorithms
Hierarchical Temporal Memory including HTM Cortical Learning Algorithms



















{kind=link}
{kind=link}